
Ref: 33-007-PCI
Twin Rotor MIMO - Système non linéaire à double rotor, Nécessite logiciel MATLAB non fourni
Avec carte interface PCI 1x168PIN 175x100 mm et câbles pour MATLAB(tm) fournis. Doc. en anglais
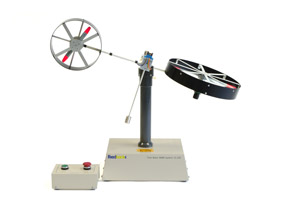
Le système à double rotor montre les bases d'un système non linéaire avec couplage croisé.
Son comportement est similaire à un hélicoptère, mais l'angle d'attaque du rotor est fixe et les forces aérodynamiques peut être contrôlées en changeant la vitesse du moteur (applicable pour Matlab, y compris la carte d'interface MATLAB® et câble).
Caractéristiques
Système classique multi-tailles.
Analyse dynamique.
Identification de modèles discrets.
Conception, test et implantation des contrôleurs dans des applications temps réel.
Modélisation des différentes stratégies de contrôle.
Processus non linéaires.
Reconnaissance des boucles fermées.
Thèmes d'apprentissage
Stabilisation PID et suivi Contrôle horizontal. Stabilisation PID, 1 degré de liberté (DDL) et commande de suivi de la direction vertical avec compensation du centre de gravité.
Contrôle de stabilisation et de poursuite PID 2-DDL. Paramétrage.
Réglage de paramètres.
Analyse dynamique couplée.
Découplage dynamique.
Analyse phénoménologique.
Caractéristiques techniques :
Dimensions: Largeur 800 mm x profondeur 350 mm x hauteur 750 mm
Poids: 11 kgs
Matériel livré :
- la maquette Twin Rotor,
- le boîtier SCSI adapateur,
- le câble pour la carte PCI,
- Carte d'interface Advantech 1711/U,
En option:
Supplément requis:
MATLAB modèles pour Ensemble de deux rotors MIMO ( 33-949-SW )
PC avec un système d'exploitation Windows (non fourni) adaptable (Win 7 ou Win 10, 64bit)avec la version MATLAB choisie par l'utilisateur et un emplacement PCI.
MATLAB ver 8.6 (2015ba) pour Win 7 ou ver 9.2 (2017a) ou ultérieure sont prises en charge (non fournis).
Le toolbox de MATLAB doit inclure: - Simulink, Système de régulation, système d'Identification, Target Windows temps-réel, Matlab Coder, Simulink Coder (non fournis)
Son comportement est similaire à un hélicoptère, mais l'angle d'attaque du rotor est fixe et les forces aérodynamiques peut être contrôlées en changeant la vitesse du moteur (applicable pour Matlab, y compris la carte d'interface MATLAB® et câble).
Caractéristiques
Système classique multi-tailles.
Analyse dynamique.
Identification de modèles discrets.
Conception, test et implantation des contrôleurs dans des applications temps réel.
Modélisation des différentes stratégies de contrôle.
Processus non linéaires.
Reconnaissance des boucles fermées.
Thèmes d'apprentissage
Stabilisation PID et suivi Contrôle horizontal. Stabilisation PID, 1 degré de liberté (DDL) et commande de suivi de la direction vertical avec compensation du centre de gravité.
Contrôle de stabilisation et de poursuite PID 2-DDL. Paramétrage.
Réglage de paramètres.
Analyse dynamique couplée.
Découplage dynamique.
Analyse phénoménologique.
Caractéristiques techniques :
Dimensions: Largeur 800 mm x profondeur 350 mm x hauteur 750 mm
Poids: 11 kgs
Matériel livré :
- la maquette Twin Rotor,
- le boîtier SCSI adapateur,
- le câble pour la carte PCI,
- Carte d'interface Advantech 1711/U,
En option:
Supplément requis:
MATLAB modèles pour Ensemble de deux rotors MIMO ( 33-949-SW )
PC avec un système d'exploitation Windows (non fourni) adaptable (Win 7 ou Win 10, 64bit)avec la version MATLAB choisie par l'utilisateur et un emplacement PCI.
MATLAB ver 8.6 (2015ba) pour Win 7 ou ver 9.2 (2017a) ou ultérieure sont prises en charge (non fournis).
Le toolbox de MATLAB doit inclure: - Simulink, Système de régulation, système d'Identification, Target Windows temps-réel, Matlab Coder, Simulink Coder (non fournis)
Poids: 15 Kg Delai de livraison estimé : 16 semaines
