Ref: E6.3.1.5
E6.3.1.5 Régulation de vitesse et de tension
Système modulaire sur plaque
Système
Les expériences sont mises en place avec des plaques expérimentales dans le cadre de profil.
Le Profi-CASSY est utilisé pour commander le système régulé ou la boucle de régulation et enregistrer les valeurs de mesures pertinentes.
Objectifs pédagogiques
- Reconnaissance des principes de contrôle de base
- Guidage et contrôle des défauts
- Logiciel d'évaluation et de simulation de manipulation
Fonction
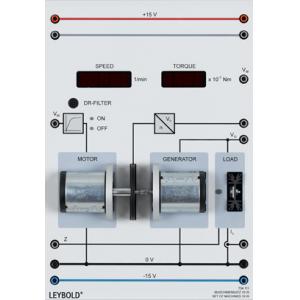
Le groupe de machines de 10 W dispose de deux machines DC à excitation permanente et à charge électroniquement contrôlable.
Les machines sont mécaniquement liées les unes aux autres au niveau de leurs arbres et forment une unité de moteur-générateur.
La charge à commande électronique est utilisée pour enregistrer les caractéristiques de charge et pour étudier les perturbations sur la vitesse et la tension.
L'entraînement de la machine et de la charge sont contrôlés directement depuis le régulateur amont.
Un actionneur externe n'est pas nécessaire.
Un pré-filtre commutable, donne au groupe de machines 10 W le comportement dynamique qu'un grand jeu de machines.
Méthode
Les équipements conviennent à la démonstration ainsi qu'aux expériences pour étudiants.
Les expériences sont réalisées avec un manuel électronique et les fichiers de mesures pour CASSY Lab 2 et WinFACT.
Où Insertion & Lecture : Les expériences démarrent automatiquement après l'appel du fichier de mesure.
Groupes cibles
Les groupes cibles comprennent les étudiants qui suivent une formation professionnelle en génie électrique et les étudiants ingénieurs en automatisation et mécatronique.
Le cours propose des expériences d'introduction qui sont très simples et aborde aussi des sujets difficiles de niveau licence.
Thèmes
- Caractéristique du système de régulation de température
- Enregistrement de la réponse à un échelon
- Grandeur optimale, compensation de boucle de régulation
- Techniques de régualtion
- Régulation de limite
- Dimensionnement empirique des régulateurs
- Conception de régulateur avec des constantes de temps connues pour le système régulé
- Conception du régulateur par compensation de pôle zéro, détermination KR en exécution batch
- Conception du régulateur par optimisation numérique
- Méthode de Ziegler-Nichols
- Contrôle de consigne et de la perturbation avec un régulateur électronique
- Régulation de température avec software de régulation
- Régulation de la température avec simulation orientée objet
- Régulation de température avec régulateur à deux positions, influence de l'hystérésis
- Régulation à deux points avec rétroaction retardée
- Régulation à deux positions avec rétroaction retardée
- Régulation de température avec régulateur à trois positions
- Modélisation de la boucle de régulation
Figure similaire
Équipement comprenant :
1 734 02 Ajusteur de la valeur de consigne
1 734 064N Régulateur PID numérique Net
1 734 111 Ensemble de machines 10 W
1 524 016S2 Profi-CASSY Starter 2
1 775 685FR LIT-print: Régulation de vitesse et de tension
1 726 09 Cadre profilé T130, deux étages
1 726 86 Alimentation stabilisée ± 15 V/3 A
1 500 59 Cavalier protégé, noirs, jeu de 10
1 500 592 Cavalier protégé avec prise, noirs, jeu de 10
3 500 641 C
Les expériences sont mises en place avec des plaques expérimentales dans le cadre de profil.
Le Profi-CASSY est utilisé pour commander le système régulé ou la boucle de régulation et enregistrer les valeurs de mesures pertinentes.
Objectifs pédagogiques
- Reconnaissance des principes de contrôle de base
- Guidage et contrôle des défauts
- Logiciel d'évaluation et de simulation de manipulation
Fonction
Le groupe de machines de 10 W dispose de deux machines DC à excitation permanente et à charge électroniquement contrôlable.
Les machines sont mécaniquement liées les unes aux autres au niveau de leurs arbres et forment une unité de moteur-générateur.
La charge à commande électronique est utilisée pour enregistrer les caractéristiques de charge et pour étudier les perturbations sur la vitesse et la tension.
L'entraînement de la machine et de la charge sont contrôlés directement depuis le régulateur amont.
Un actionneur externe n'est pas nécessaire.
Un pré-filtre commutable, donne au groupe de machines 10 W le comportement dynamique qu'un grand jeu de machines.
Méthode
Les équipements conviennent à la démonstration ainsi qu'aux expériences pour étudiants.
Les expériences sont réalisées avec un manuel électronique et les fichiers de mesures pour CASSY Lab 2 et WinFACT.
Où Insertion & Lecture : Les expériences démarrent automatiquement après l'appel du fichier de mesure.
Groupes cibles
Les groupes cibles comprennent les étudiants qui suivent une formation professionnelle en génie électrique et les étudiants ingénieurs en automatisation et mécatronique.
Le cours propose des expériences d'introduction qui sont très simples et aborde aussi des sujets difficiles de niveau licence.
Thèmes
- Caractéristique du système de régulation de température
- Enregistrement de la réponse à un échelon
- Grandeur optimale, compensation de boucle de régulation
- Techniques de régualtion
- Régulation de limite
- Dimensionnement empirique des régulateurs
- Conception de régulateur avec des constantes de temps connues pour le système régulé
- Conception du régulateur par compensation de pôle zéro, détermination KR en exécution batch
- Conception du régulateur par optimisation numérique
- Méthode de Ziegler-Nichols
- Contrôle de consigne et de la perturbation avec un régulateur électronique
- Régulation de température avec software de régulation
- Régulation de la température avec simulation orientée objet
- Régulation de température avec régulateur à deux positions, influence de l'hystérésis
- Régulation à deux points avec rétroaction retardée
- Régulation à deux positions avec rétroaction retardée
- Régulation de température avec régulateur à trois positions
- Modélisation de la boucle de régulation
Figure similaire
Équipement comprenant :
1 734 02 Ajusteur de la valeur de consigne
1 734 064N Régulateur PID numérique Net
1 734 111 Ensemble de machines 10 W
1 524 016S2 Profi-CASSY Starter 2
1 775 685FR LIT-print: Régulation de vitesse et de tension
1 726 09 Cadre profilé T130, deux étages
1 726 86 Alimentation stabilisée ± 15 V/3 A
1 500 59 Cavalier protégé, noirs, jeu de 10
1 500 592 Cavalier protégé avec prise, noirs, jeu de 10
3 500 641 C
Techniques > Régulation > Bases de la régulation > Régulation de vitesse / tension
Formations > CPGE > Regulation - Asservissement